 1
129.11.2025
Первый деплой геодезиста — MOL'T RTLS
Когда геодезист открывает терминал
Когда в жизни мужчины случается первый деплой — это всегда волнительно. Пришлось завести GitHub, разобраться с Node.js (ну как разобраться — узнать, что такое терминал), а остальное — дело вайб-кодинга. За 8 часов получился весьма сносный UI для проекта, который мы вынашивали давно: локальная навигация без спутников.
Проблема знакома всем, кто работает на закрытых акваториях, в тоннелях, под мостами, в портах с глушением GPS. Однолучевым эхолотом ещё можно работать с тахеометром-роботом, но многолучевой — слишком сложная система для такого подхода. Нужно что-то другое.
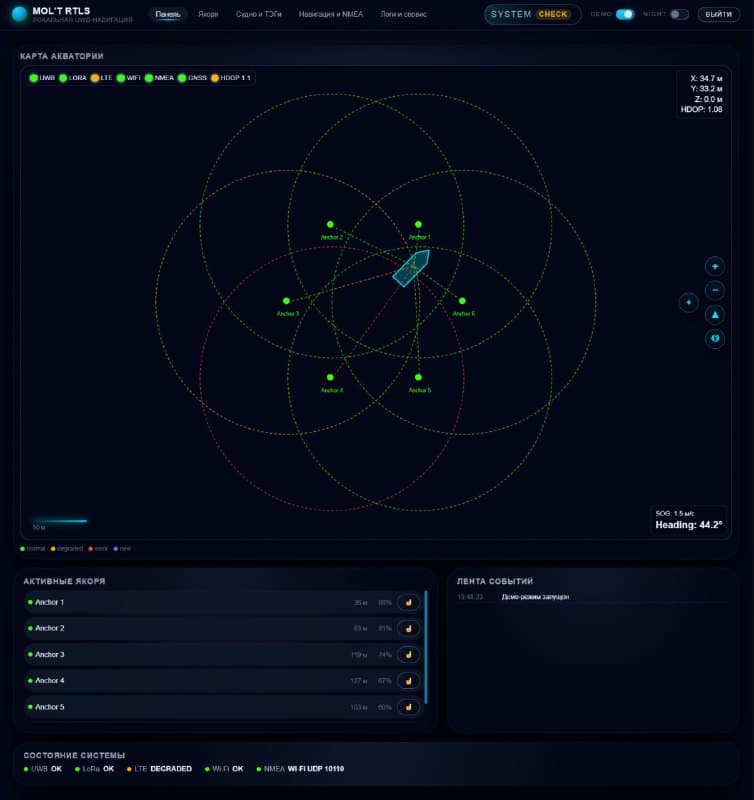
Как устроена MOL'T RTLS
Идея простая, реализация — нетривиальная. До 8 береговых якорей (Anchor) на штативах по береговой линии, питаются от пауэрбанков. На борту судна — два UWB-тега (Tag A и Tag B), жёстко закреплённые на корпусе. Между ними базовая линия, по которой считается курс даже без гирокомпаса.
Tag A измеряет дальности до якорей по UWB, решает навигационную задачу, ведёт фильтр Калмана (EKF) и выдаёт стандартные строки NMEA GGA/VTG в любое дноуглубительное ПО. То есть система одновременно и держит курс по двум тегам, и позиционирует судно по заранее закоординированным якорям — полностью без GNSS или в условиях его глушения.
Компактные якоря разворачиваются «из чемодана» за 15 минут. Веб-интерфейс даёт координаты в любой СК, пишет KML, загружает подложки. А NMEA уходит куда угодно — в Hypack, QINSy, наш MOL'T Boats App. Система для дноуглубления, шламонакопителей, рейдовых операций и закрытых акваторий, где спутники — не вариант.
Читайте также
→ Услуга: Гидрография и батиметрия — /services/hydrography
→ Статья: Гидрография без GNSS — работа при глушилках — /blog/hydro-without-gnss
→ Статья: Как мы создавали moltboats.com — /blog/moltboats-platform-2025
Читайте также



Понравилась статья?
Подпишитесь на наш Telegram-канал — там всё самое свежее из полей.